
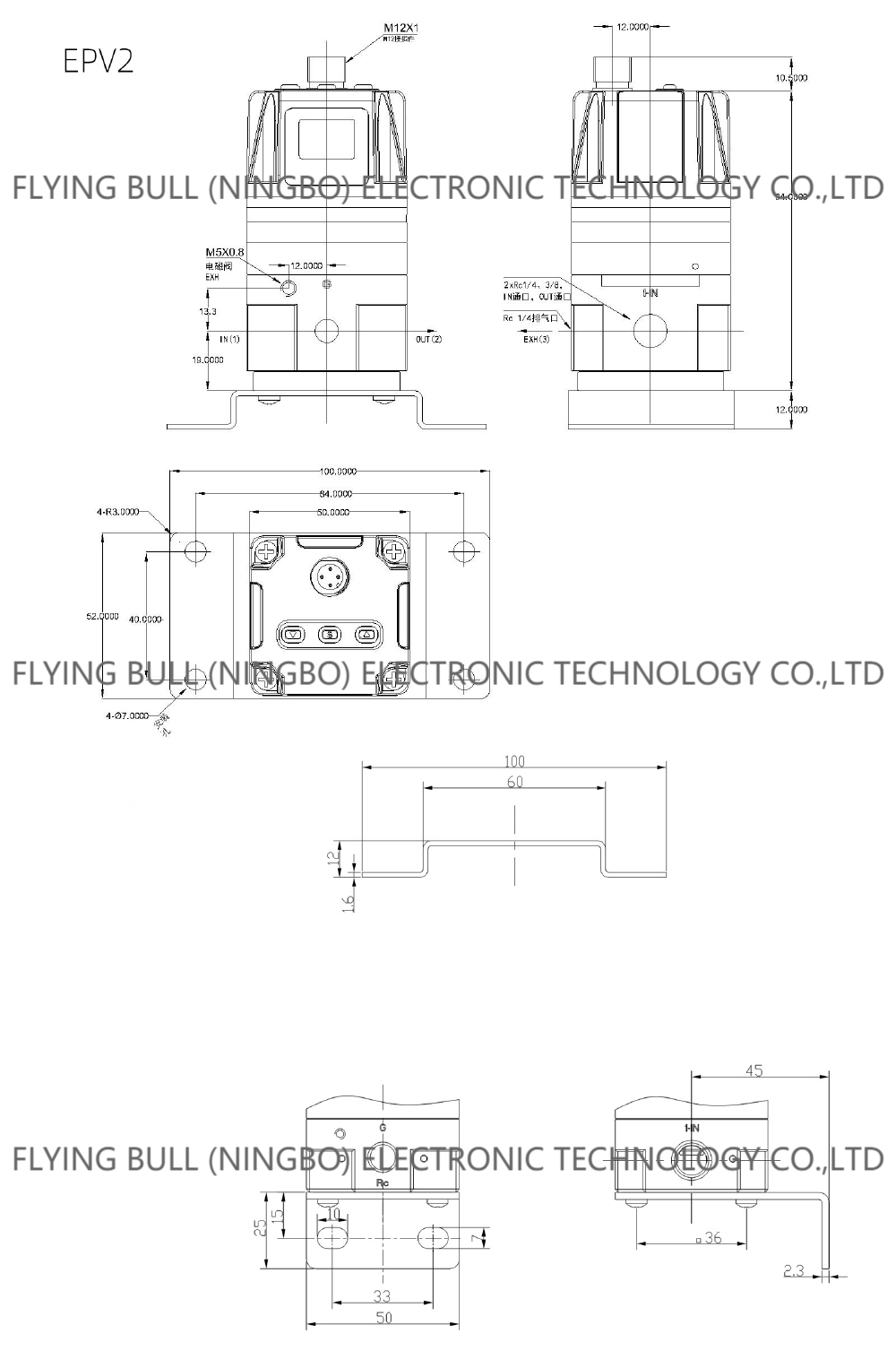
ຜູ້ຄວບຄຸມການກັ່ນຕອງທາງອາກາດ Epv2 ຊຸດ Pneumaticic Pneumaticic ProportianEnervalv

ລາຍລະອຽດ
ຄວາມກົດດັນຂອງການສະຫນອງ MU: ກໍານົດຄວາມກົດດັນ + 0.1MPA
ຈໍານວນຕົວແບບ: Epv2-1 Epv2-3 epv2-5
ຕັ້ງລະດັບຄວາມກົດດັນ: 0.005 ~ 0.5mpa
ປະເພດການປ້ອນຂໍ້ມູນປະຈຸບັນ: DC4 ~ 20MA, DC0 ~ 20MA
ປະເພດແຮງດັນໄຟຟ້າເຂົ້າ: DC0-5V, DC0-10V
ຜົນຜະລິດປ່ຽນຜົນຜະລິດ: NPN, PNP
DC: 24V 10%
DC: 24V ຫນ້ອຍກ່ວາ 1.2A
ປະເພດຂໍ້ບົກຜ່ອງດ້ານການປ້ອນຂໍ້ມູນ: 250ωຫນ້ອຍກ່ວາ
ປະເພດແຮງດັນໄຟຟ້າການປ້ອນຂໍ້ມູນ: ປະມານ6,5kω
ການປ້ອນຂໍ້ມູນ preset: DC24VTTYPE: ປະມານ 45.7K
ຜົນຜະລິດທີ່ສົມດຸນ: "DC1-5V (Impedance Impedance: 1kωmoreກ່ວາ)
DC4-20MA (Impatance Load: 250kωlessກ່ວາ
ຄວາມຖືກຕ້ອງຂອງຜົນຜະລິດພາຍໃນ 6% (FS) "
ເສັ້ນຊື່: 1% fs
SLUGGIS: 0.5% fs
ການເຮັດຊ້ໍາຄືນ: 0.5% fs
ລັກສະນະຂອງອຸນຫະພູມ: 2% fs
ຄວາມຖືກຕ້ອງຂອງຄວາມກົດດັນ: FS 2%
ຈົບການສະແດງຄວາມກົດດັນ: 1000GRUTEUTUARATION
ອຸນຫະພູມອາກາດລ້ອມຮອບ: 0-50 ℃
ຊັ້ນຮຽນປົກປ້ອງ: IP65
ຄວາມສາມາດໃນການສະຫນອງ
ຂາຍຫນ່ວຍຂາຍ: ລາຍການດຽວ
ຂະຫນາດຊຸດດ່ຽວ: 7x4x5 cm
ນ້ໍາຫນັກລວມດຽວ: 0.300 ກິໂລ
ການແນະນໍາກ່ຽວກັບຜະລິດຕະພັນ
ປ່ຽງແບບອັດຕາສ່ວນໄຟຟ້າແມ່ນເພື່ອຮັບຮູ້ການຄວບຄຸມການໄຫລຂອງກະແສໂດຍການຄວບຄຸມເອເລັກໂຕຣນິກ. ອຸປະກອນຄວບຄຸມໄຟຟ້າຄວບຄຸມໄຟຟ້າປະກອບມີປ່ຽງທີ່ມີອາກາດແລະການຄວບຄຸມປ່ຽງ solenoid ສະຫຼັບ, ເຄື່ອງຫມາຍຄວາມກົດດັນແກັບແລະວົງຈອນຄວບຄຸມ. ໃນເວລາທີ່ມີສັນຍານເຂົ້າ, ປ່ຽງ supernoid ຂອງ intenoid ໄດ້ຖືກປິດ, ວາວສໍາຄັນ
ການແກ້ໄຂຫລັກທໍາໂຄງສ້າງ
ໃນເວລາທີ່ສັນຍານການປ້ອນຂໍ້ມູນເພີ່ມຂື້ນ, ວາວທົດລອງ 1 ຂອງ vale solenoid ສໍາລັບການສະຫນອງອາກາດ Diaphragm 2 ຖືກເປີດແລະບໍລິສັດສະຫາຍຂອງປ່ຽງ 3 ຖືກປິດ, ເຊິ່ງເປັນຜົນມາຈາກຄວາມກົດດັນຂອງຜົນຜະລິດ. ຄວາມກົດດັນຂອງຜົນຜະລິດນີ້ແມ່ນຖືກປ້ອນກັບວົງຈອນຄວບຄຸມ 8 ໂດຍຜ່ານເຊັນເຊີຄວາມກົດດັນ 6. ເນື່ອງຈາກວ່າບໍ່ມີກົນໄກທີ່ມີຄວາມສາມາດ, ວາວແມ່ນບໍ່ມີຄວາມບໍ່ສະອາດແລະມີການແກ້ໄຂຫຼັກຖານຄວາມຫນ້າເຊື່ອຖືສູງ
ໃນເວລາທີ່ສັນຍານການປ້ອນຂໍ້ມູນເພີ່ມຂື້ນ, ວາວທົດລອງ 1 ຂອງ vale solenoid ສໍາລັບການສະຫນອງອາກາດ Diaphragm 2 ຖືກເປີດແລະບໍລິສັດສະຫາຍຂອງປ່ຽງ 3 ຖືກປິດ, ເຊິ່ງເປັນຜົນມາຈາກຄວາມກົດດັນຂອງຜົນຜະລິດ. ຄວາມກົດດັນຂອງຜົນຜະລິດນີ້ແມ່ນຖືກປ້ອນກັບວົງຈອນຄວບຄຸມ 8 ໂດຍຜ່ານເຊັນເຊີຄວາມກົດດັນ 6. ເນື່ອງຈາກວ່າບໍ່ມີກົນໄກທີ່ມີສຽງດັງ, ວາວແມ່ນບໍ່ມີຄວາມບໍ່ສະອາດແລະມີຄວາມຫນ້າເຊື່ອຖືສູງ.
ຮູບຜະລິດຕະພັນ
ລາຍລະອຽດຂອງບໍລິສັດ







ປະໂຍດບໍລິສັດ
ການຂົນສົ່ງ

ສົງໄສ






